
1. Cel ćwiczenia
Celem niniejszego ćwiczenia jest zapoznanie studentów z działaniem przekładnika prądowego. Ćwiczenie ma dać wgląd w mechanizm generowania błędu przekładnika prądowego oraz pokazać zależności granicznego błędu przekładnika od mocy i charakteru obciążenia
2. Wstęp teoretyczny
Przekładnik prądowy jest to transformator jednofazowy, względnie małej mocy pracujący w stanie zbliżonym do zwarcia, przeznaczony do zasilania urządzeń pomiarowych lub zabezpieczeniowych. Prąd w jego uzwojeniu wtórnym, w normalnych warunkach pracy, jest praktycznie proporcjonalny do prądu uzwojenia pierwotnego, a jego faza różni się od fazy prądu pierwotnego o kąt, który jest bliski zeru przy zastosowaniu odpowiedniego połączenia. W przeciwnym przypadku kąt między prądem pierwotnym a wtórnym jest zbliżony do 180°. Znormalizowane wartości prądu znamionowego wtórnego to 1A i 5A, a mocy to np. 15 VA; 30 VA; 90 VA. Wartości prądów ciągłych i zakłóceniowych po stronie pierwotnej muszą być uzasadnione warunkami w miejscu ich pracy w systemie elektroenergetycznym. Prądy te są znormalizowane i mogą zawierać się w dość szerokim przedziale. Wartości prądów znamionowych należy wybierać z szeregu R10, tj. 1-1,25-1,6-2-2,5-3,15-4-5-6,3-8 oraz ich 10n krotności. Zapisy w normie precyzują też znormalizowany sposób rysowania przekładników prądowych wraz z wymaganymi oznaczeniami co pokazano na rysunku 1. W normie dotyczącej przekładników prądowych PN-EN-60044-1 określone są również m.in.: definicje, normalne i specjalne warunki pracy, dane znamionowe, wymagania konstrukcyjne. Zasadniczą częścią normy są badania jakim powinny być poddane przekładniki prądowe by gwarantowały bezpieczną i niezawodną ich pracę, zgodnie z deklarowanymi parametrami znamionowymi w całym min. 30 letnim okresie eksploatacji. Ćwiczenie realizowane podczas laboratorium wykonywane jest zgodnie z normą PN-EN-60044-1 jako próba wyrobu, czyli próba której powinien być poddany każdy nowo wytworzony przekładnik prądowy przeznaczony do pracy w sieci elektroenergetycznej z urządzeniami zabezpieczającymi i przyrządami pomiarowymi.
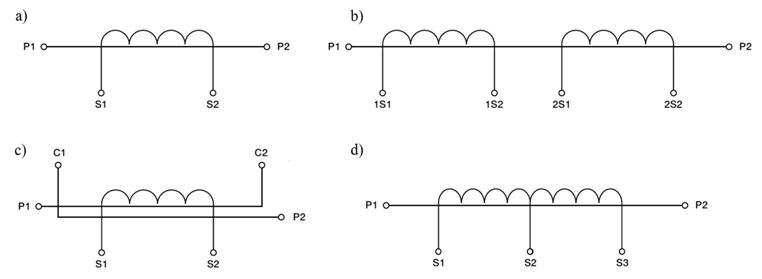
Rys.1. Znormalizowane oznaczenia przekładnika prądowego
Przekładnik prądowy zamontowany jest bezpośrednio na torze prądowym (np. linia, szyna) przez który płynie mierzony prąd. Jest zawsze włączany w obwód szeregowo i prąd płynący w uzwojeniu pierwotnym nie jest zależny ani od przekładnika prądowego ani od jego obciążenia. Nie bierze on bezpośredniego udziału w przesyle i wytwarzaniu energii elektrycznej. Bezpośredni pomiar prądu często nie jest możliwy ze względu na dużą wartość jego amplitudy oraz wysokie napięcie na mierzonym torze prądowym.
Przekładnik prądowy indukcyjny składa się z rdzenia, wykonanego z blach transformatorowych o dużej przenikalności magnetycznej oraz z uzwojeń pierwotnego i wtórnego (Rys. 2). Rdzeń wykonuje się z materiałów ferromagnetycznych. Do zacisków wtórnych przyłączony jest obwód zawierający elementy o znikomej impedancji (np. amperomierz).
Przekładniki prądowe ze względu na przeznaczenie posiadają odpowiednie charakterystyki przenoszenia. Wyróżnia się:
- przekładniki pomiarowe do zasilania urządzeń pomiarowo-licznikowych. Znormalizowane klasy dokładności to 0,2 i 0,5.
- przekładniki zabezpieczające. wykorzystywane do zasilania aparatury zabezpieczającej. Znormalizowane klasy dokładności to 5 i 10P.
Od przekładników pomiarowych wymaga się dużej dokładności w zakresie od zera do wartości nieco powyżej znamionowego prądu ciągłego. Rdzenie pomiarowe są tak budowane by podczas przetężeń stosunkowo szybko się nasycać i nie dopuszczać do pojawienia się prądów wyższych niż prądy graniczne aparatury pomiarowej. Ma to na celu uniknięcia uszkodzenia podłączonych do niego czułych urządzeń pomiarowych. Przekładniki zabezpieczające charakteryzuje dość dokładna transformacja w stanach zwarcia w systemie elektroenergetycznym, więc w warunkach znacznych przetężeń prądowych. Przy prądach znamionowym nie wymaga się od przekładników zabezpieczeniowych dużej dokładności pomiaru. Niezależnie od warunków pracy od przekładników prądowych wymaga się spełnienia określonych norm transformacji prądu. Dla niektórych rodzajów zabezpieczeń ważne jest zapewnienie prawidłowej odpowiedzi przekładników prądowych na przebiegi przejściowe z duża zawartością harmonicznych lub składowych aperiodycznych.
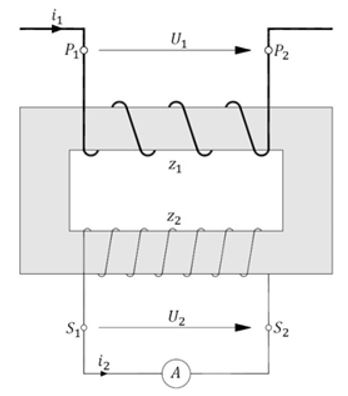
Rys.2. Budowa przekładnika prądowego. P1,P2- zaciski strony pierwotnej, S1,S2 – zaciski strony wtórnej, z1,z2 – odpowiednio uzwojenie pierwotne i wtórne, i1,i2 – odpowiednio prąd strony pierwotnej i wtórnej, U1,U2 – odpowiednio napięcie strony pierwotnej i wtórnej
Przekładniki możemy podzielić ze względu na wartość napięcia sieci w której będą pracować na nisko, średnio i wysokonapięciowe. Przekładniki budowane są jako wnętrzowe lub napowietrzne. Można je podzielić również na wsporcze i montowane na przewodach. Innym parametrem przypisującym je do odpowiedniej grupy może być wykonanie izolacji: przekładniki suche, przekładniki olejowe, przekładniki w osłonie gazu SF6, przekładniki zbudowane z żywic epoksydowych. Należy wspomnieć również o istnieniu najnowszej grupy przekładników prądowych jakimi są przetworniki sensorowe czy przekładniki optyczne. Zdjęcia poglądowe różnych typów przekładników pokazane są na rysunku 3.
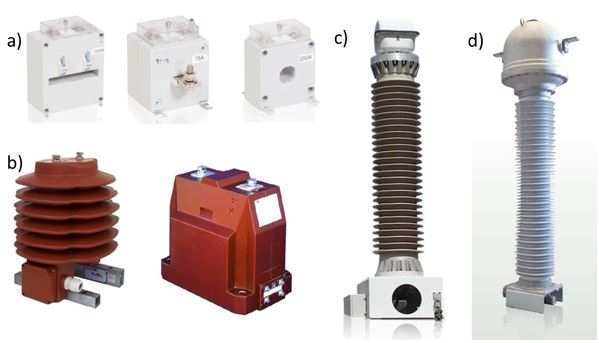
Rys.3. Widok przykładowych przekładników prądowych, a) niskonapięciowe firmy ABB, b) średniego napięcia, od lewej przekładnik CTSO 17 firmy Inter Polska oraz przekładnik prądowy firmy Ritz, c) wysokonapięciowy kombinowany sensorowy typu OMU firmy ABB, d) wysokonapięciowy z SF6 firmy Arteche
Przekładniki prądowe przeznaczone do zabezpieczeń muszą zachować określoną dokładność nawet przy znacznych przetężeniach. Przetężeniami można nazwać wszystkie stany pracy przekładnika prądowego, w których wartość prądu pierwotnego przekracza 120% wartości znamionowej. Musi być zachowana dokładność transformacji w stanach zakłóceniowych nawet gdy prąd pierwotny jest wielokrotnie większy niż znamionowy prąd przekładnika. Błąd pomiarów w stanach obciążenia roboczego nie ma w tym przypadku istotnego znaczenia.
Rdzeń przekładnika można potraktować jako warunkowo nieliniowy, tzn. mający charakterystykę liniową dla wartości chwilowych, a nieliniową dla wartości skutecznych. Przy określonej wartości indukcji krzywoliniowa charakterystyka magnesowania jest zastąpiona linią prostą, co oznacza, że jeśli sinusoidalnie zmienia się prąd pierwotny, to sinusoidalnie zmieniają się wszystkie wielkości charakteryzujące przekładnik, a w szczególności prąd jałowy. Aby zapewnić dokładność transformacji, prąd magnesujący iμ musi być niewielki w porównaniu z prądem pierwotnym przeliczonym na stronę wtórną i1′, a więc impedancja obciążenia Zobc musi być mała w porównaniu z impedancją gałęzi magnesowania czyli równolegle połączonych Lμ i RFe. W rzeczywistości, jeśli indukcja jest sinusoidalna, to prąd magnesujący iμ jest odkształcony. Jednak prąd ten jest najczęściej tak znikomy w porównaniu z prądem i2, że nawet gdy jest bardzo odkształcony, nie zmienia w widoczny sposób przebiegu prądu wtórnego.
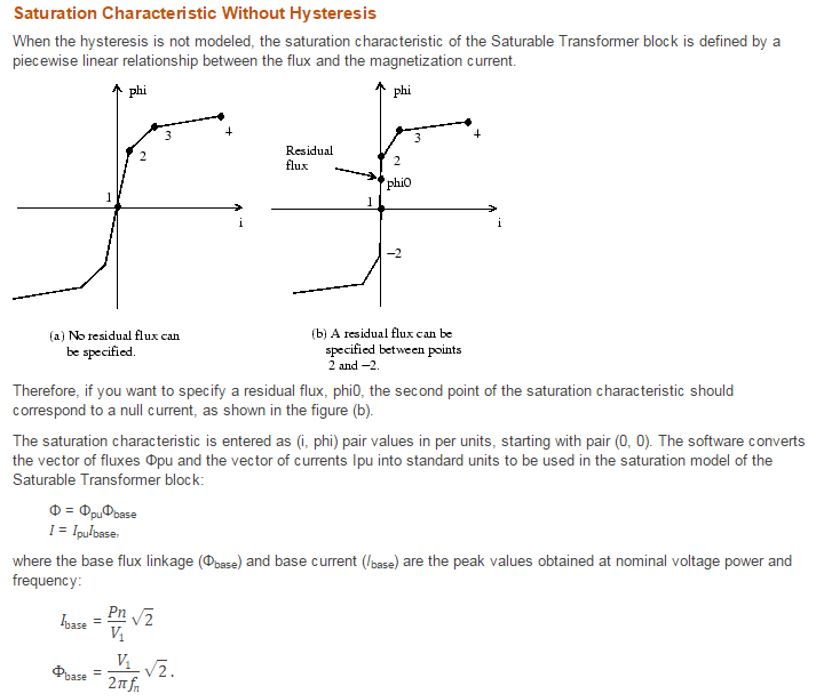
Zakres poprawnej pracy przekładnika jest bezpośrednio związany z jego konstrukcją, warunkowany jest głównie poprzez zmianę warunków magnetycznych. W pewnym zakresie nieliniowość charakterystyki magnesowania oraz wynikająca z niej nieliniowość indukcyjności Lμ jest jeszcze na tyle nieznaczna, że linearyzacja schematu zastępczego jest dopuszczalna (rys. 4). Punkt 1 na charakterystyce magnesowania wskazuje minimalną wartość natężenia przy którym przekładnik transformuje prąd z określoną dokładnością. Odcinek |12| jest prostoliniową częścią charakterystyki w której przyjmuje się liniowość transformacji prądu przekładnika. Przekładnik pracujący na odcinku |23| nasyca się, dla wytworzenia większego strumienia magnetycznego prąd magnesujący musi znacznie wzrosnąć, dlatego też prąd uchybowy szybko wzrasta, powodując zwiększenie błędu całkowitego. Ze względu na wzrost temperatury rdzenia, znaczne zwiększenie natężenia powyżej punktu 3 może doprowadzić do uszkodzenia przekładnika na skutek przegrzania.
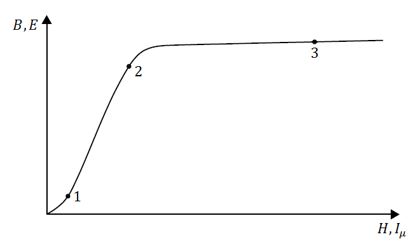
Rys. 4. Podstawowa charakterystyka magnesowania przekładnika.
Do analizy pracy przekładnika w zakresie małych przetężeń ze względu na nieznaczne odkształcenia prądu mogą być stosowane metody analizy obwodów liniowych. Zakres ten jest bardzo istotny z punktu widzenia zastosowań przekładników w technice zabezpieczeniowej. W zakresie małych przetężeń dla określenia dokładności transformacji prądu w stosunku do przekładników prądowych zabezpieczeniowych używa się parametru jakim jest graniczny współczynnik dokładności ALF (ang. Accuracy Limit Factor) dawnej nazywany liczbą przetężeniową. Jest to stosunek znamionowego granicznego prądu pierwotnego Igr do znamionowego prądu pierwotnego Izn – (1).
(1)
Znamionowy graniczny prąd pierwotny Igr jest to wartość skuteczna prądu pierwotnego, dla której przekładnik spełnia wymagania w zakresie błędu całkowitego. Współczynnik ALF wynika z budowy przekładnika prądowego, określa przy jakim prądzie pierwotnym zostanie zachowana zadana dokładność. Przekładnik o oznaczeniu 5P20 zachowuje dokładność 5% przy prądzie pierwotnym dwadzieścia razy większym w stosunku do prądu pierwotnego znamionowego.
Przekładniki zabezpieczeniowe dodatkowo opisuje się przez wtórną graniczną siłę elektromotoryczną Usgr jest to iloczyn granicznego współczynnika dokładności ngr, znamionowego prądu wtórnego Isn oraz sumy wektorowej obciążenia znamionowego Zn i impedancji uzwojenia wtórnego Zs – (2).
![]()
(2)
Dla przekładników pomiarowych określamy współczynnik bezpieczeństwa przyrządu FS (ang. Factor Security) jest to stosunek znamionowego prądu pierwotnego bezpiecznego przyrządu do znamionowego prądu pierwotnego Ipn. Bezpieczeństwo aparatu zasilanego przez ten przekładnik jest największe, gdy wartość współczynnika bezpieczeństwa przyrządu (FS) jest mała – (3).
(3)
3. Model przekładnika
Symulacji dokonuje się w środowisku Matlab’a i pakietu Simulink, więc przekładnik został zamodelowany przez blok Saturable Transformer (Rys. 5). Na rys. 6 pokazano tabelę parametrów modelu transformatora w Simulink.
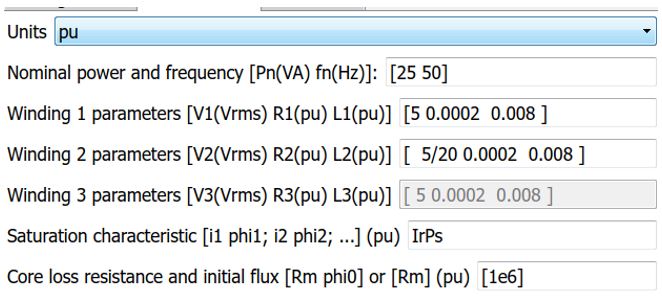
Rys. 6. Tablica parametrów modelu transformatora
Przekładnik prądowy jako transformator został scharakteryzowany w ten sposób, że:
- uzwojenie wtórne przekładnika jest uzwojeniem pierwotnym (uzwojeniem odniesienia) transformatora)
- moc znamionowa przekładnika jest mocą znamionową transformatora Pn,
- prąd znamionowy wtórny wraz z mocą przekładnika definiują znamionowe napięcie uzwojenia pierwotnego przekładnika oraz wartość odniesienia (1p.u. –
 , por. Help) dla strumienia skojarzonego pierwotnego transformatora (4).
, por. Help) dla strumienia skojarzonego pierwotnego transformatora (4).

(4)
- przekładnia przekładnika
 określa znamionowe napięcie uzwojenia wtórnego transformatora (5)
określa znamionowe napięcie uzwojenia wtórnego transformatora (5)
(5)
- impedancja uzwojeń jest pomijalnie mała
- charakterystykę magnesowania blachy skaluje się na przykład tak, aby jej kolanu odpowiadał prąd magnesujący równy 0,5% 10x prąd bazowy (0,05*(1 p.u.) i strumień 10*(1 p.u.) – por. skrypt bh.m. Charakterstykę i-phi do tablicy parametrów wstawia się jako tablicę IrPs – Rys. 7.
Rys. 7. Charakterystyka magnesowania rdzenia badanego przekładnika
Parametry modelu ustawia się w skryptach symulacyjnych pp_ser.m oraz pp_vect.m
4. Układ symulacji
Układ symulacji (Rys. 8) odtwarza zasadę fizycznego układu (Rys. 9) do pomiaru granicznego współczynnika granicznego, z tym że nie ma potrzeby stosowania przekładnika pomocniczego w obwodzie wtórnym przekładnika badanego.
Wymuszeniem odtwarza sinusoidalne źródło prądowe o fazie tak dobranej, aby początkowa wartość napięcia wtórnego była szczytem jego cosinusoidy (odpowiednio do obciążenia – por. skrypt pp_ser.m).
Skrypt powyższy służy także do ustawienia parametrów jednej symulacji:
- krotności mocy obciążenia cfl,
- współczynnika mocy obciążenia cos_fi_lo
- krotności wymuszenia prądowego cfa
W trakcie symulacji rejestrowane są przebiegi czasowe prądu przekładnika referencyjnego (idealnego) ir, prądu strony wtórnej przekładnika badanego is oraz prąd błędu ie będącego różnicą ir – is. Przykładowe przebiegi prądów, dla punktu pracy przekładnika w liniowym oraz nieliniowym zakresie charakterystyki magnesowania przedstawia Rys. 10.
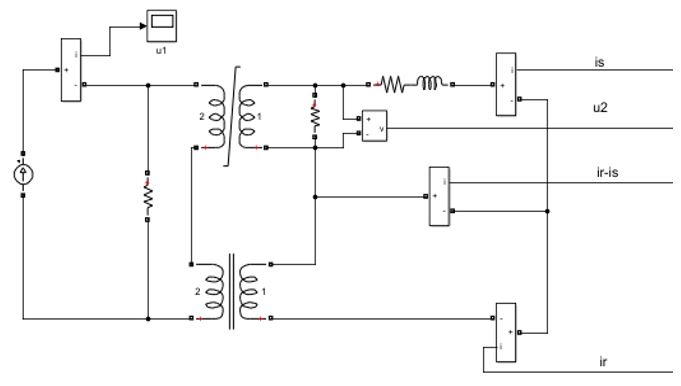
Rys. 8. Model symulacyjny układu pomiarowego.
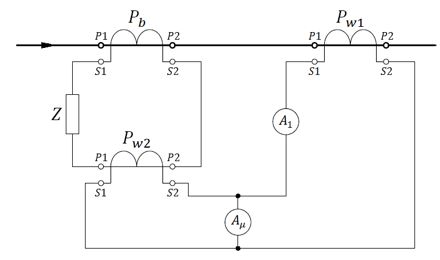
Rys. 9. Układy rzeczywisty (laboratoryjny) pomiaru wektora błędu transformacji.
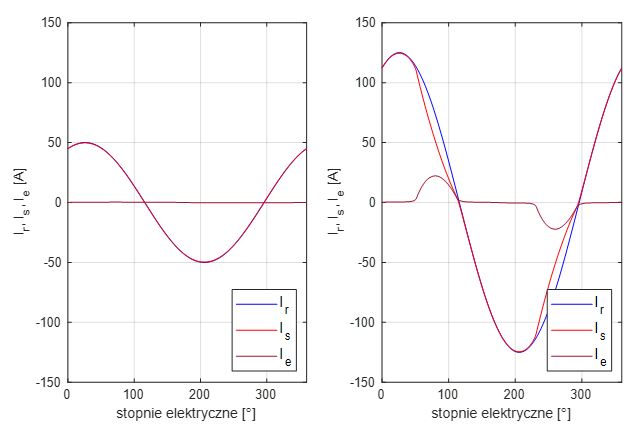
Rys. 10. Przebieg czasowy prądów, podczas pracy przekładnika w liniowym (lewy) oraz nieliniowym zakresie (prawy) charakterystyki magnesowania.
5. Eksperyment i analiza wyników
Podstawowy eksperyment polega na serii symulacji, przeprowadzanej przez pp_ser.m, przy stopniowo narastającym wymuszeniu prądowym i stałych pozostałych parametrach układu. Dla każdej próby z serii, określa się wartości skuteczne prądu wtórnego przekładnika referencyjnego (z liniowym rdzeniem) Ir, prądu wtórnego badanego przekładnika Is oraz prądu błędu całkowitego transformacji Ie. Wartości te można odczytać z wyświetlaczy na pulpicie modelu Simulink’a, lub odczytać z odpowiedniej zmiennej w pamięci Matlaba, jeśli serią steruje skrypt pp_ser.m.
Eksperyment można zobrazować automatycznie – korzystając z tablicy krotności wymuszenia cr (parametr cfat) oraz względnego modułu błędu transformacji wlimm (parametr: erret). W skrypcie pp_ser.m tablice te są zapisywane do pliku results.mat. Kilka charakterystyk wlimm(cr;Sl) w różnych warunkach można zestawić korzystając z pliku wgr.m. por. Rys. 11.
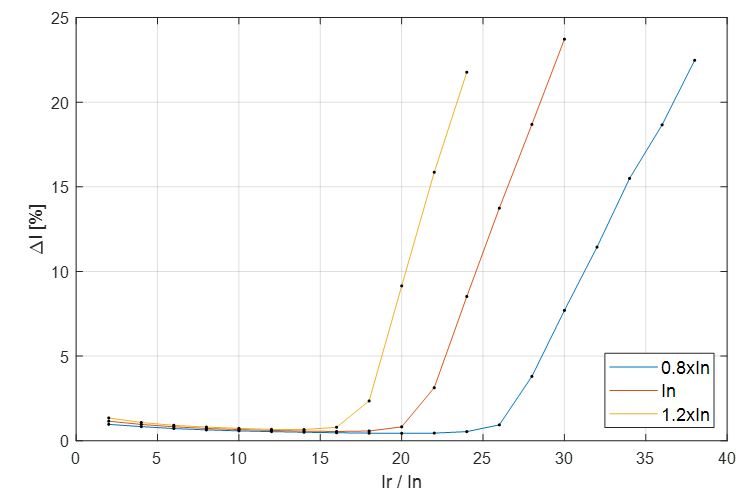
Rys. 11. Zależności dla różnych mocy obciążenia przekładnika (In=25VA, cosφ=0,9)
Wyjaśnienie mechanizmu powstawania błędów w przekładniku prądowym daje wgląd w przebiegi czasowe prądów ir, is, ie, napięcia us oraz strumienia magnetycznego przekładnika ψs, a w kolejnym kroku wykreślenie wykresu wektorowego z wybranej próby. Uruchamiając skrypt s2_pp_vect.m przeprowadzona zostaje pojedyncza symulacja dla zadanych parametrów, dla której uzyskiwane są następujące przebiegi czasowe wspomnianych sygnałów. widoczne na Rys. 12. Przedstawiony przebieg zawiera jeden okres składowej podstawowej wymuszenia. Widoczny czerwony prostokątny przebieg, jest linią pomocniczą, wykorzystywaną do określenia momentu przejścia prądu przez zero, natomiast niebieska kropka jest wykrytą chwilą przejścia prądu przez zero. Na Rys. 13. jest widoczna charakterystyka magnesowania.
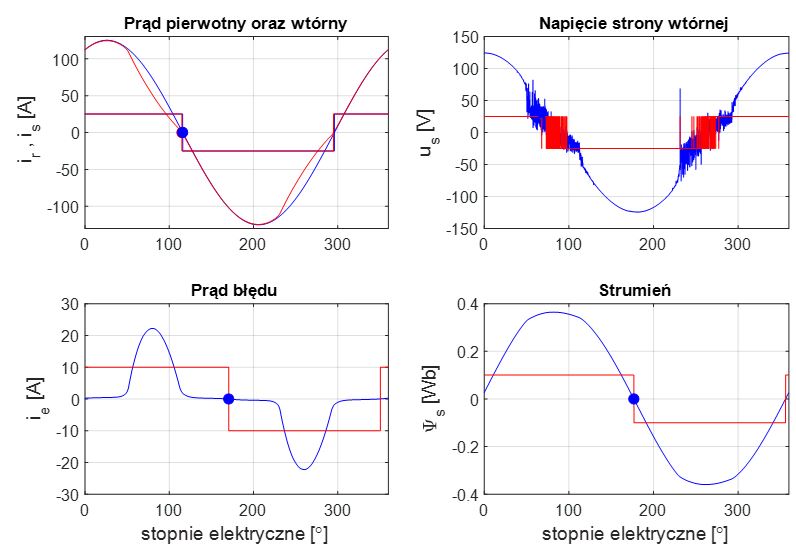
Rys. 12. Zestawienie przebiegów z jednej próby transformacji
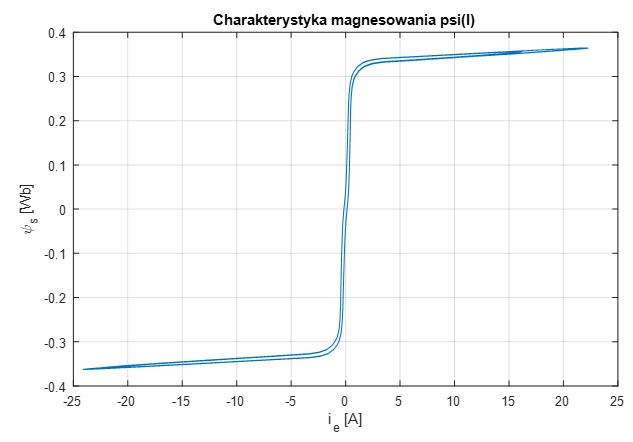
Rys. 13. Charakterystyka magnesowania zrealizowana w jednej próbie transformacji
W skrypcie, na podstawie uzyskanych przebiegów czasowych z symulacji, wyznaczane są wartości skuteczne przebiegów Ir, Is, Ie, Us, Ψs z wykorzystaniem funkcji Skut.m oraz przesunięcia fazowe przebiegów poszczególnych wielkości, z wykorzystaniem funkcji Zero.m. Zestawienie obliczonych wartości skutecznej R, amplitudy A oraz fazy f danego sygnału znajduje się w postaci wektorów zmiennej np. Wx = [Ax, Rx, fx]. Zestawienie charakterystycznych wielkości obliczonych dla przebiegów przedstawia Rys. 14.
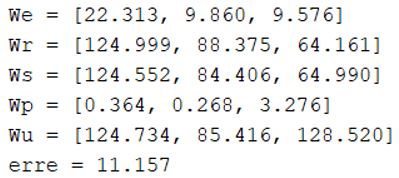
Rys. 14. Zestawienie wyników jednej z prób, widoczne w Command Window Matlaba
Na podstawie obliczonych wielkości, przy wykorzystaniu skryptu s3_pp_wwekt.m możliwe jest wykreślenie wykresu wektorowego analizowanej próby, takiego jak na Rys. 15.
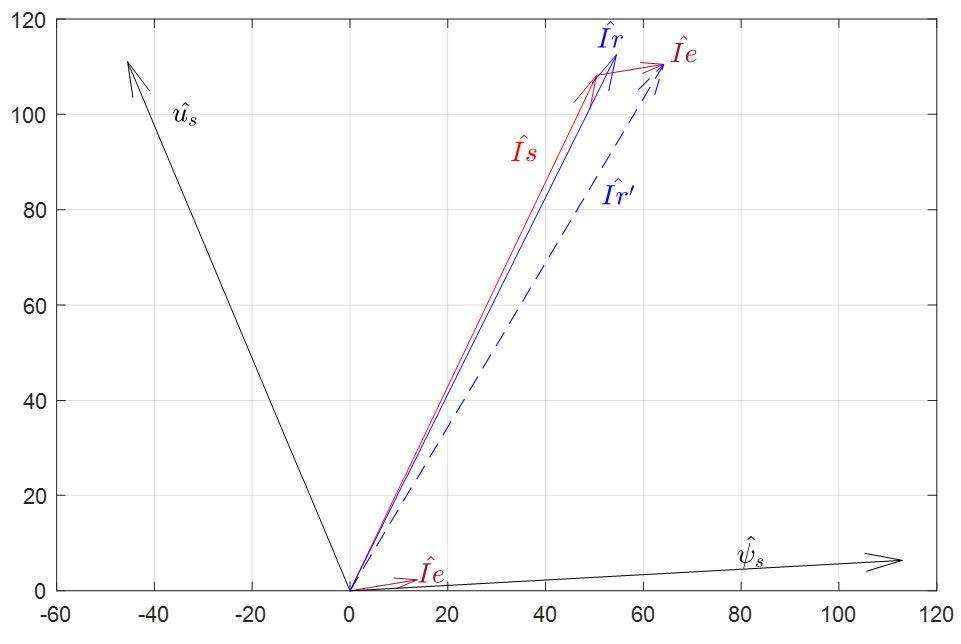
Rys. 15. Wykres wektorowy z jednej próby transformacji
6.Pytania kontrolne
- Zdefiniować czym jest graniczny współczynnik dokładności przekładnika prądowego.
- Wymienić i opisać podstawowe parametry znamionowe przekładników prądowych.
- Opisać budowę indukcyjnego przekładnika prądowego.
- Skąd biorą się błędy przekładników prądowych i jaki mają charakter?
- Czy różni się przekładnik prądowy dla celów pomiarowych i zabezpieczeniowych?
7. Sprawozdanie
Dla wybranego urządzenia elektroenergetycznego np. rozdzielnicy SN, zaprojektuj, wykonaj oraz opisz przebieg próby wytrzymałości zwarciowej. Wzorując się na opisanej wcześniej procedurze badawczej, sprawozdanie powinno zawierać dodatkowo:
– parametry znamionowe badanego urządzenia na podstawie dokumentacji techniczno-rozruchowej
– z wykorzystaniem skryptu s1_pp_ser.m oraz s4_wgr.m zbadać wpływ parametrów obwodu na błąd przetwarzania w funkcji krotności prądu (Rys. 11). Analizę przeprowadzić dla wpływu cos_fi_lo, cfl. Sformułować obserwacje oraz wnioski.
– Analiza wygenerowanego wygenerowanego wykresu wektorowego, dla przekładnika w liniowym oraz nieliniowym zakresie punktu pracy, przedyskutować:
- skąd się bierze oraz co wpływa na błąd pomiarowy przekładnika
- jak wzrost lub zmniejszenie obciążenia przekładnika wpływa na dokładność
W zależności od zadanych parametrów prądowych, należy wykonać odpowiednie zmiany w skrypcie, mające na celu dodanie lub dopasowanie opisów na generowanych rysunkach.